Protogen wireless handpaws
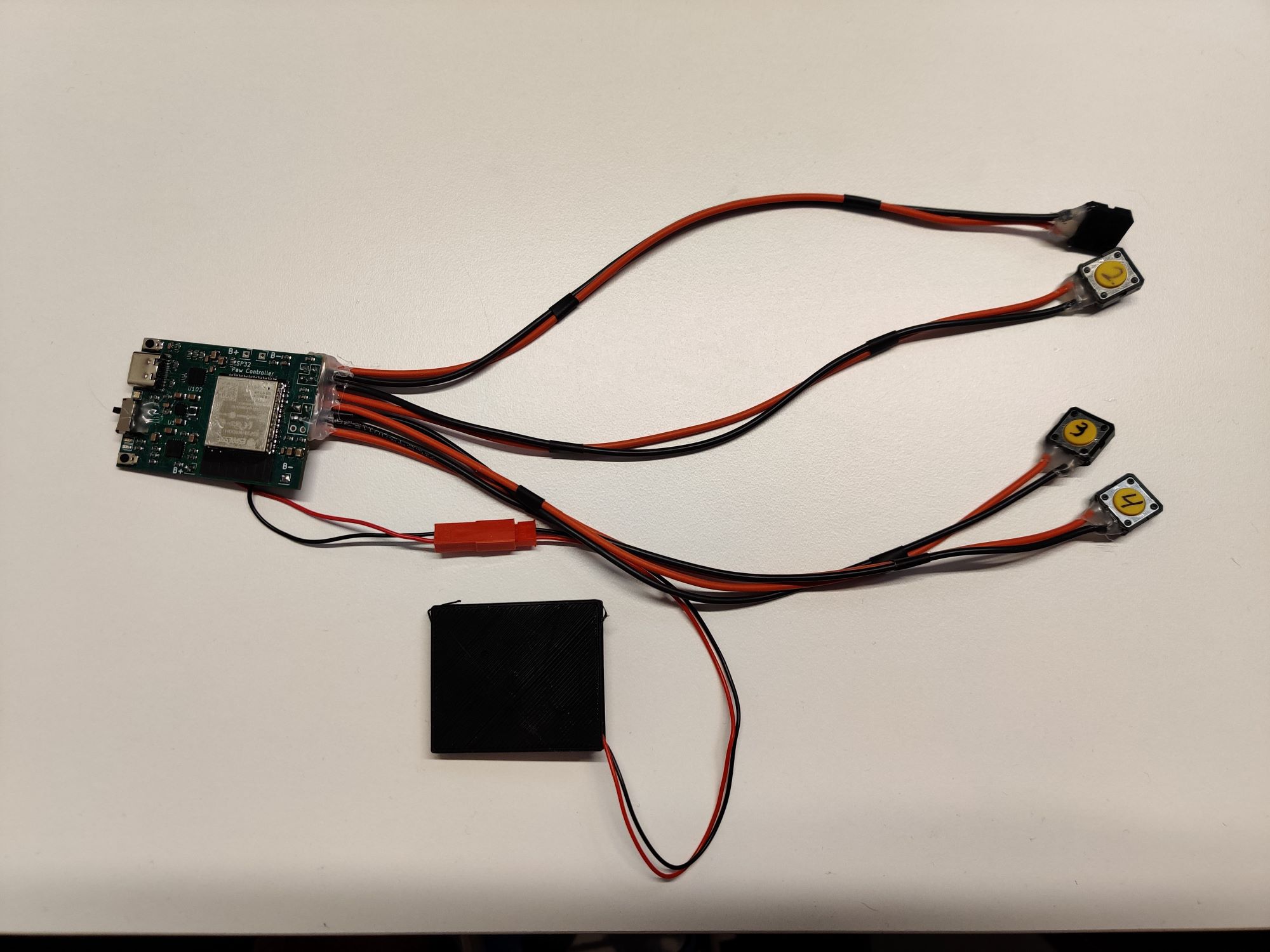
Wireless controllers are sewn inside the handpaws to allow control of the protogen head with buttons located in the fingers.
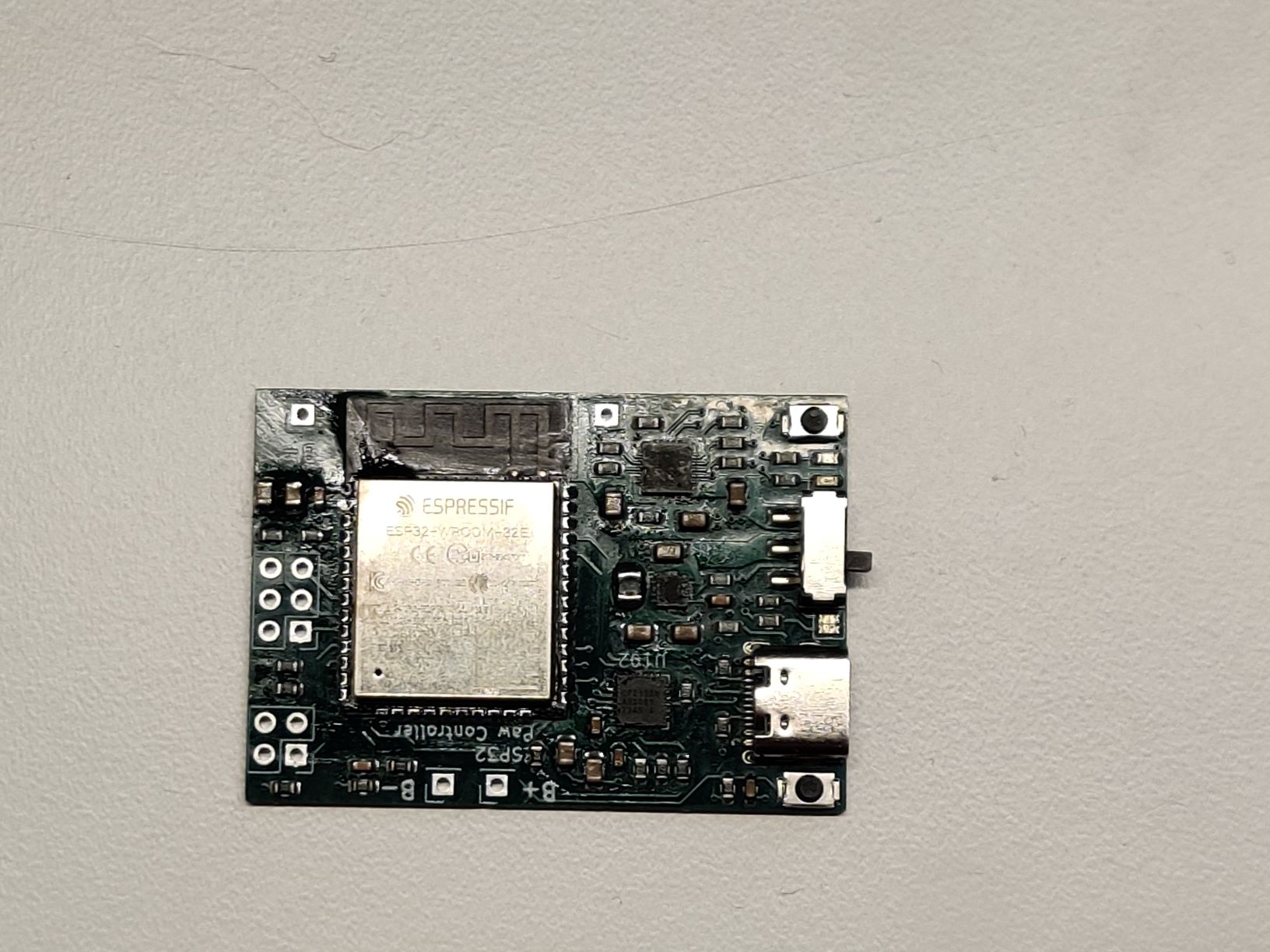
- Uses ESP-NOW for wireless communication. Can be easily used with any microcontroller
- Choice of four or five buttons
- Sends commands when a button is pressed, released or held
- RGB LED to indicate current effect
- Powered with LiPo battery
- Integrated LiPo battery charger and protection circuitry
- Sleep mode to save power
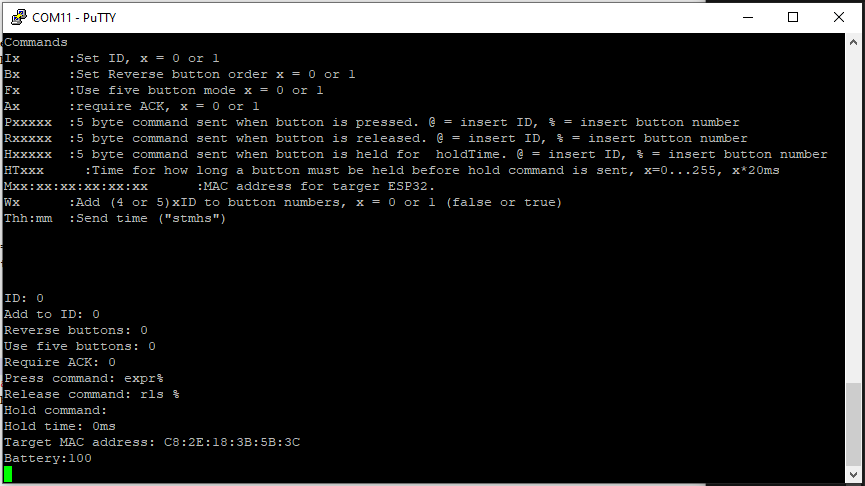
- Settings can be changed through USB COM port (MAC address, Commands, ...)
The handpaw controller has multiple settings, which can be changed through a serial terminal.
| Command | Explanation |
|---|---|
| Ix | Set ID, x = 0 or 1 |
| Bx | Reverse button order, x = 0 or 1 |
| Fx | Use five button mode (normally uses four buttons), x = 0 or 1 |
| Ax | Require ACK. Retransmits commands up to five times if ACK (button number) is not received back, x = 0 or 1 |
| Pxxxxx | 5 byte command sent when button is pressed, @ = insert ID, % = insert button number |
| Rxxxxx | 5 byte command sent when button is released, @ = insert ID, % = insert button number |
| Hxxxxx | 5 byte command sent when button is held, @ = insert ID, % = insert button number |
| HTxxx | Time for how long a button must be held before hold command is sent, x=0...255, x*20ms |
| Mxx:xx:xx:xx:xx:xx | MAC address for target ESP32 |
| Wx | Add (4 or 5)*ID to button numbers, x = 0 or 1 |
| Thh:mm | Set time for protogen controller (Legacy feature for V1 protogen controllers) |